DOI:10.29111/ijlrst ISRA Impact Factor:3.35

Research Paper Open Access
International Journal of Latest Research in Science and Technology Vol.2 Issue 6, pp 26-31,Year 2013
Correspondence should be addressed to :
Received : 25 December 2013; Accepted : 28 December 2013 ; Published : 31 December 2013

| Download | 125 |
|---|---|
| View | 177 |
| Article No. | 10224 |
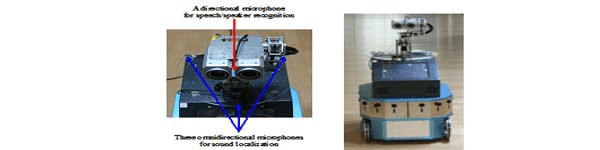
This paper is concerned with an enhanced multimodal sound localization with humanlike auditory system for a network-based intelligent service robot, which exploits strong information technology infrastructure. The objective of this paper is to integrate several audiovisual-based Human-Robot Interaction (HRI) components that can naturally interact between human and robot through audiovisual information obtained from robot camera and microphones in the noisy environments or the presence of multiple persons. The proposed approach is comprised of two main stages. The first stage performs speech recognition, sound localization, and speaker recognition to know whether the user calls the robot or not as well as the direction and identification of the caller respectively, when someone calls robot’s name. In the second stage, an intelligent robot moves forward to the specific caller based on multiple face detection/recognition with the aid of the information identified by speaker recognition among multiple persons. The robot platform used in this study is WEVER, which is a network-based intelligent service robot developed in Electronics and Telecommunication Research Institute. This robot refers to an Ubiquitous Robotic Companion (URC) that provides necessary services anytime and anywhere. The effectiveness of the proposed approach is compared with other multimodal methods and sound localization itself.
Copyright © 2013 Keun-Chang Kwak et al. This is an open access article distributed under the Creative Commons Attribution 4.0 International (CC BY 4.0) license which permits unrestricted use, distribution, and reproduction in any medium, provided the original work is properly cited.
Keun-Chang Kwak , " An Enhanced Multimodal Sound Localization With Humanlike Auditory System For Intelligent Service Robots ", International Journal of Latest Research in Science and Technology . Vol. 2, Issue 6, pp 26-31 , 2013

MNK Publication was founded in 2012 to upholder revolutionary ideas that would advance the research and practice of business and management. Today, we comply with to advance fresh thinking in latest scientific fields where we think we can make a real difference and growth now also including medical and social care, education,management and engineering.

We offers several opportunities for partnership and tie-up with individual, corporate and organizational level. We are working on the open access platform. Editors, authors, readers, librarians and conference organizer can work together. We are giving open opportunities to all. Our team is always willing to work and collaborate to promote open access publication.

Our Journals provide one of the strongest International open access platform for research communities. Our conference proceeding services provide conference organizers a privileged platform for publishing extended conference papers as journal publications. It is deliberated to disseminate scientific research and to establish long term International collaborations and partnerships with academic communities and conference organizers.